现在是2025年。你坐在手术室里,看着医生小心翼翼地把指尖插入顶针状的黑色执行器。
医生面前的屏幕上闪现的是肠道里的影像。当医生操作控制装置时,你感觉自己的肠子里一阵搅动。
24小时前你吞下了一颗看似寻常的药丸,除了它的块头着实不小。现在,进入你身体的那团胶状物开始活跃起来。
那枚药丸实际上是一套可吞服的电子设备,一种微型机器人,使医生可以在不必开刀的情况下检查你体内的情况。
这就是“增强人类”的世界,科技赋予我们前所未有的感知、技能和力量。
那种可吞服的机器人只是英国布里斯托尔的研究人员想要实现的众多设想之一。他们正在进行研究,希望利用机器人来增强而不是取代人类。
“就像人类不是无所不能、无所不知一样,机器人也将始终存在局限性。”——卡内基梅隆大学教授曼奴拉·维罗索
其他项目包括,外科医生可以远程实施精确度超高的手术,以及让管理人员在分隔地球两端的办公室里同时办公。
当下,有关机器人的讨论往往都透着一股机器人将取代而不是帮助人类的恐惧情绪。
然而,布里斯托尔机器人实验室(Bristol Robotics Laboratory)副主任安东尼·派普(Anthony Pipe)教授说,正在布里斯托尔进行的研究表明,机器人技术“将是增强人类,而不是淘汰人类”。
他认为,这项研究反映了机器人和人类共生共存的未来:机器人和人类并肩工作,加强人类的各项能力。
“机器人可以在很多方面帮助人类,”派普说,“这实际上是一个新的重要领域。帮助人类将是一个巨大的增长领域。机器人不会取代人类。”
派普谈到了通力合作的“人机组合”。“这并不是说机器人突然就变得和人类没什么两样。它们仍然是机器人,做着简单乏味的事情,按照人类的命令行事。但以后,机器人能做的事情可能比它们现在做的事情更加有用,更加需要技巧。”
他认为,机器人将在日常工作和生活中成为人类的帮手。有这种想法的不止他一人。美国卡内基梅隆大学教授曼奴拉·维罗索(Manuela Veloso)打造了轮式机器人CoBots,它可以自动陪同人们穿过大学建筑物,在需要的时候向人们提供帮助,比如帮人按电梯。
维罗索说,机器人可以帮助人类,它们也始终需要人类,不管是在下雪天需要人类掌握方向盘的自动驾驶汽车,还是无法抓牢滑溜物品的仓库拣货机器人。
“就像人类不是无所不能、无所不知一样,机器人也将始终存在局限性,”维罗索说,“人们将继续开发算法,使机器人不仅本身派得上用场,而且能够请求帮助。”
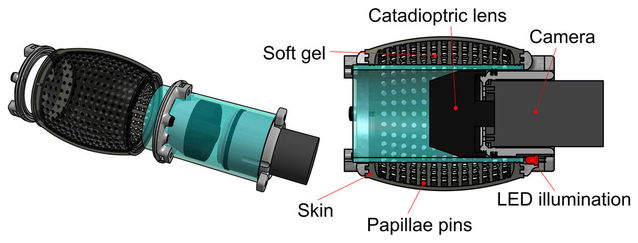
那种可吞服的机器人名为MuBot,是研究人员本·温斯顿(Ben Winstone)在英国布里斯托尔机器人实验室的研究重点。
实际上,这种机器人会在它的表面和医生的指尖之间建立联系,当机器人按压肠道内部时,医生会感受到那种触觉,就好像是他自己的手指在按压。利用这种机器人,未来的医生可以得知患者体内肿瘤和其他癌变组织的轮廓特征,这是非常重要的诊断依据。
“医生花费多年时间训练提高他们的触觉,使他们可以通过触摸身体来识别体内可疑的肿块,”温斯顿说。
“如果可以在不开肠破肚的情况下把手伸进体内,他们就能够更好地感知病情,”他说。
机器人药丸的剖面图
机器人化身
在很多科幻小说中,人类过着间接感知的生活。他们坐在虚拟现实舱里,控制机器人化身去做各种危险的事。他们毫不担心,因为他们知道自己不会受到任何伤害。
保罗·布雷姆纳(Paul Bremner)博士正在开发的系统还远远无法让我们把机器人作为我们的第二生命,但可能是朝那个方向迈出的第一步。在布里斯托尔机器人实验室,布雷姆纳正在开发的系统使人们能够控制另一个房间里的机器人,最后或许可以控制另一座城市甚至另一个国家里的机器人。
这种系统现在已经能够运行。到实验室拜访布雷姆纳,戴上虚拟现实头盔,你就可以透过一个机器人的眼睛看世界。
“如果你正在和某个性格外向的人互动,当你做手势时,机器人会做出更为夸张的手势,”——布里斯托尔机器人实验室研究员保罗·布雷姆纳
上面说到这款机器人名叫Nao,由Aldebaran Robotics公司研制。它看起来并不威武,身高不到60厘米,脸上总是挂着一幅惊奇的表情。虽然这个机器人化身可能从幼童的视角看这个世界,但布雷姆纳的系统仍然提供了一种仿佛灵魂出窍的体验。你转头,Nao也跟着转头,你抬手,Nao也跟着抬手,这多亏了微软Kinect的动作追踪功能。
透过Nao的眼睛(实际上是两个720p立体摄像头)看世界,这立刻会令人觉得怪异和有趣,尤其是你转头看见另一个你站在自己旁边的时候。
布雷姆纳预计,这种远程机器人技术的一个用途是让管理人员能够出现在几百甚至几千公里以外的办公室里,而他们根本不用离开家。
“这肯定是你想用这种技术做的事情之一。你不是通过在线聊天软件Skype进行对话,而是通过Nao机器人化身进行对话,”布雷姆纳说。
当然,如果老板以白色塑料机器人的形象出现,只有你膝盖那么高,你可能很难把老板当一回事,但Nao的小身材应该不是个问题。布雷姆纳应该能够把他为Nao开发的系统转移到一种更大、更有威严的机器人身上。
想让机器人捕捉微妙的肢体语言,比如眯眼、噘嘴和摊掌,还有很长的路要走。Nao可以摊手、握拳,还会张开嘴巴露出惊讶的表情。
这就是布雷姆纳为什么着眼于其他机器人的原因,比如身高是Nao两倍的3D打印机器人Poppy,以及表情更加丰富、可利用反向投影改变面部特征的机器人Robothespian。布雷姆纳正在考虑给机器人装上定制手臂,以便做出更加丰富的手势。
布雷姆纳说,虽然关节僵硬、表情呆板的机器人缺乏人类那样的表达能力,但它们能够凝视某人,模仿有限的手势,这已经比目前的远程临场机器人更进一步了。
他说:“我认为,远程临场机器人的问题在于,它们基本上只是带轮子的Skype。”
因此丢失了面对面交流的很多微妙暗示,布雷姆纳接着说道。你无法确切地知道那个人在关注谁。当你只是机器人脖子上的一块屏幕时,更加难以留住人们的注意力。
布雷姆纳的机器人也可以通过在你的视野上叠加信息的方式,告诉你它如何判断正在进行的对话,以此挽回因为没有进行面对面交谈而丢失的一些反馈。
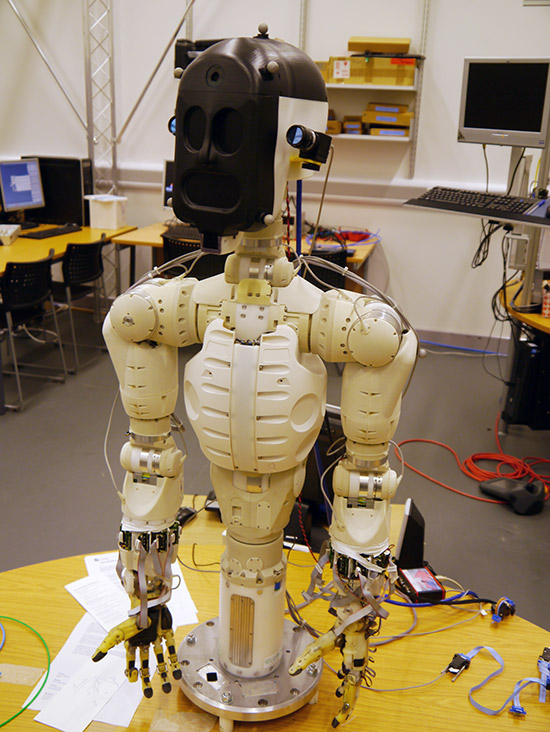
布里斯托尔机器人实验室的可控制机器人
“我们可以把信息叠加到你的视野上,这样你就能更好地了解互动进行得怎么样,你需要作出什么调整,”他说。
机器人不仅可以模仿你的手臂和头部动作,还能使动作更为夸张,以帮助你在交谈时和对方相处得更加愉快。
“我们希望使机器人的控制实现半自主化,”布雷姆纳说,“这样一来,如果你正在和某个性格外向的人互动,当你做手势时,机器人会做出更为夸张的手势。”
同样,布雷姆纳在伦敦玛丽女王大学的合作伙伴,正在研究如何让机器人的动作配合说话者声音所透露出的情绪,或者强调某一点。
令布雷姆纳特别感兴趣的是,当某人以机器人的形象出现时,人们对他的反应会发生怎样的变化?如果老板使用机器人化身,人们是否仍然会尊敬他,按照他的吩咐行事?
“那对人们的个性感知和群体互动这类东西会产生什么影响?”他说。
目前,布雷姆纳的系统距离实际应用还很远。他正在利用该系统研究人们在与某人的机器人化身互动时会作何反应,从而为远程控制和自主机器人与人类之间的未来互动奠定基础。
布雷姆纳说:“我的想法是收集大量信息,了解人们在使用机器人化身时的表现和互动情况,以便为专家系统建立知识领域。”
布雷姆纳面临的一个主要技术障碍,是如何使机器人与目前负责处理图像的电脑之间实现无线连接。如果做到这一点,机器人就能自由移动,而非站着不动。
解决这个障碍后,布雷姆纳希望机器人化身在用双腿走路之前先靠轮子行动。他预计,第一种可行动的机器人化身将使用轮子,采用平衡车那样的控制方式。
远程控制的机器人化身将在不久后进行第一次实际测试,布雷姆纳打算看看人们在荒岛求生等团队拓展训练中对机器人有何反应。
找人参加测试应该不是个问题。布雷姆纳公布这项测试时,引起了热烈反响。
“大多数人都觉得‘哇,这真的很有意思’,”他说。
机器人手术
在人类成为地球主宰的过程中,我们灵巧的双手发挥了至关重要的作用。
但人类的手存在局限性,尤其是在进行高精度工作的时候,比如腹腔镜手术,医生只能利用几个小的切口,而不是一个大的开放性切口。
微创手术使病人失血更少,术后疼痛时间更短,这意味着以前需要在医院里躺几周的病人,现在能够更快地康复。然而,这类手术不仅需要医生手稳,还需要用到多个工具和助手。
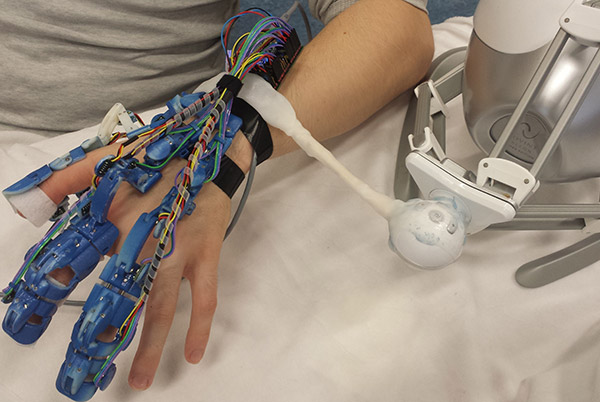
外科医生佩戴的外骨骼,用来控制机器人的手
现在,像达芬奇手术系统这样的机器人系统让外科医生对机器人的手进行远程控制,由于机器人双手的动作精准度远远超过人类,因此能够进行精度更高、出血更少的手术。
在进行前列腺切除等精细手术时,使用机器人系统已变得越来越常见,但在某些方面还有改善的空间。
一个方面是训练。博士生研究员安东尼娅·特泽马纳基(Antonia Tzemanaki)说,外科医生通常需要训练2000个小时才能熟练操作达芬奇手术机器人。这可能需要医生花费1到5年才能累积这么长的训练时间。
为了使这类系统变得更加灵巧和直观,特泽马纳基和她在布里斯托尔的同事正在开发一种机器人,与达芬奇手术机器人的“钳子手”和“剪刀手”相比,这种机器人的手更像人手。
他们开发的是有两只手的机器人,每只手有三根手指,每根手指上可安装13种手术专用工具中的一种。
外科医生把手伸进外骨骼,上面带有磁性传感器,可跟踪手的位置。然后,外骨骼把手的动作传达给机器人的手,向安装了工具的每根机器人手指描绘医生手指的动作。如果医生移动他们的拇指、食指或中指,那么机器人的拇指、食指或中指也会重复这些动作。
研究团队认为,这种机器人仔细模仿了医生的手部动作,因此医生更容易学会如何操作。
例如,在胆囊切除手术中,医生通常需要一名助手提起胆囊以便于切除。
而有了这种机器人的手,医生可以使用机器人手指上的工具提起胆囊,同时使用机器人另一只手上的工具进行牵引和切除。
“这种机器人的手比医生的手更纤细,让医生可以进行超精细的手术。”特泽马纳基说,“他们的动作将经过幅度缩小和过滤处理,变得更加精准。所以,没有震颤,更加精确。当然,机器人的手指上可安装不同的工具。”
机器人的每只手上都有三种工具,在一定程度上模仿了人手。前两个工具(食指和拇指)充当钳子的作用,剩下的中指可安装任何一种工具,比如刀片、钩子、灌注装置、凝固装置等等。
手术工具的机器人手
机器人的两只手总共可以让医生同时使用六种工具,在必要时能进行工具的调换和搭配。例如,一只手的食指和拇指可以是持针器,而另一只手的食指和拇指是钳子。每只手都让医生可以同时使用三种不同的工具。
她说,这种机器人模仿了人手的捏握动作,在进行腹腔镜手术时,比目前最先进的机器人(比如达芬奇手术系统)更加灵活和适用。
如果这种机器人的使用得到普及,那么它可能还将把医疗扫描信息叠加到病人的视频影像上,使医生获得更多的信息来帮助他们进行手术。
展望更加遥远的未来,这种机器人将受益于温斯顿让医生远程感受触觉的研究。
“在我的博士论文中,我谈到了运动学、智能机器人的设计,”特泽马纳基说,“但至关重要的下一步是产生触觉。(关键是使它)尽量接近人手的动作,尽可能地自然。”
合则更强
人类将被机器人取代的担忧,有时掩盖了机器人技术可以增强人类能力的事实。
自动化、无人机和机器人正在快速逼近运输和零售等行业,其影响尚未显现,但布里斯托尔机器人实验室的项目表明,人类和机器人能够通过合作而非彼此竞争来实现更多的成就。
埃里克·布吕诺尔夫松(Erik Brynjolfsson)教授把人类和电脑之间的这种共生关系称为“和机器赛跑”。这位麻省理工学院经济学家提醒世人做好准备,迎接自动化将引发的就业市场巨变。
Ekso Bionics和ReWalk等公司打造的机械外骨骼可能很快就会证明这一点。虽然两条腿的机器人现在走起路来跌跌撞撞,但身穿机械外骨骼的人有望将机器的力量和人类的平衡感结合起来,或许有一天将使伤残人士和年老体弱者能够自如行走,并帮助建筑工人和士兵搬运重物。
“随着科技的进步,人们将发现以前无法想象的工作,”——艾伦脑科学研究所彼得·勒多琼维奇博士
在不久的将来,机器人可能将继续面临各种严重限制。目前,机器人难以胜任我们觉得很简单的一些体力工作,比如从凌乱的仓库货架上拣取物品。机器人专家预计,在今后数年里,这类工作仍然会使机器人觉得力不从心。但利用机器人来增强人的能力,同时让人填补机器人技能的空白,这种1+1的效果将远远大于2。
艾伦脑科学研究所(Allen Institute for Brain Science)的科学家彼得·勒多琼维奇(Peter Ledochowitsch)博士认为,这反映了生物系统和合成系统如何互补,比如远程控制的机器甲壳虫比同样大小的电子设备飞得更远。
他相信,通过把自然和人造产物的最强元素结合起来,我们可以继续超越人类的极限。
“我坚持认为,随着科技的进步,人们将发现以前无法想象的工作,”勒多琼维奇说。
已故的机器人之父约瑟夫·恩格尔伯格(Joseph Engelberger)肯定会同意这个看法。他曾坚决反对机器人将抢走人们饭碗、威胁人类生存的说法。
恰恰相反,他认为机器人将使人们从单调乏味的琐碎工作中解脱出来,帮助他们实现更大的成就。
他曾对《纽约时报》说,机器人不会摧毁就业市场,只是“拿走意义不大的工作”,让我们有时间、有能力成为更好的人。
第三十五届CIO班招生
国际CIO认证培训
首席数据官(CDO)认证培训
责编:pingxiaoli
免责声明:本网站(http://www.ciotimes.com/)内容主要来自原创、合作媒体供稿和第三方投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
本网站刊载的所有内容(包括但不仅限文字、图片、LOGO、音频、视频、软件、程序等)版权归原作者所有。任何单位或个人认为本网站中的内容可能涉嫌侵犯其知识产权或存在不实内容时,请及时通知本站,予以删除。