2014-06-27 11:06:52 来源:OFweek工控网
去年工信部发布《意见》明确提出了我国工业机器人发展目标,即开发满足用户需求的工业机器人系统集成技术、主机设计技术及关键零部件制造技术,突破一批核心技术和关键零部件,提升量大面广主流产品的可靠性和稳定性指标,在重要工业制造领域推进工业机器人的规模化示范应用。
随着中国“用工荒”的进一步上演,越来越多的企业考虑用机器人来替代工人以应对这种局面,这也使得工业机器人市场需求进一步加大,各地纷纷结合自有优势发展工业机器人产业。
机器人系统的结构由机器人的机构部分、传感器组、控制部分及信息处理部分组成。其中控制系统是机器人产业的一个核心环节,如何设计好一个机器控制系统是行业发展的关键。作为自动化行业最专业的媒体OFweek工控网和OFweek机器人网专程邀请来自北京航空航天大学机器人研究所的贠超教授为大家推出《新型机器人控制器:通用工控机+软件运动控制》在线研讨会(6月18号) ,欢迎大家踊跃登记报名!…点击此处进入登记。

目前,机器人控制系统将向着基于PC机的开放型控制器方向发展,便于标准化、网络化,伺服驱动技术的数字化和分散化。本次研讨会着重讨论基于工业PC+软件运动控制的发展、构成以及其网络化的发展概况。
近几年,日本、美国和欧洲一些国家都在开发具有开放式结构的机器人控制器,如日本安川公司基于PC开发的具有开放式结构、网络功能的机器人控制器。我国863计划智能机器人主题也已对这方面的研究立项,以下看下机器人控制目前发展的现状。
机器人控制器研发现状
目前机器人控制器多采用计算能力较强的ARM系列、DSP系列、POWERPC系列、Intel系列等芯片组成。在机器人运动控制器方面,其研究主要集中在美国和日本,并有成熟的产品,如美国DELTATAU公司、日本朋立株式会社等。其运动控制器以DSP技术为核心,采用基于PC的开放式结构。
一般工业机器人公司都有自己独立的开发环境和独立的机器人编程语言,如日本Motoman公司、德国KUKA公司、美国的Adept公司、瑞典的ABB公司等。很多大学在机器人开发环境(RobotDevelopmentEnvironment)方面已有大量研究工作,提供了很多开放源码,可在部分机器人硬件结构下进行集成和控制操作,目前已在实验室环境下进行了许多相关实验。
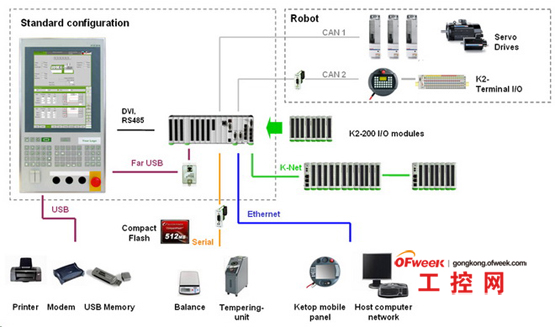
ABB机器人控制器IRC5由一个控制模块和一个驱动模块组成,可选增一个过程模块以容纳定制设备和接口,如点焊、弧焊和胶合等。配备这三种模块的灵活型控制器完全有能力控制一台6轴机器人外加伺服驱动工件定位器及类似设备。控制模块采用开放式系统架构,配备基于商用Intel主板和处理器的工业PC机以及PCI总线。由于采用标准组件,用户不必担心设备淘汰问题,随着计算机处理技术的进步能随时进行设备升级。
机器人控制器

库卡开发了一个全新的、结构清晰且注重使用开放高效数据标准的系统架构。这个系统架构中集成的所有安全控制(SafetyControl)、机器人控制(RobotControl)、运动控制(MotionControl)、逻辑控制(LogicControl)及工艺过程控制(ProcessControl)均拥有相同的数据基础和基础设施并可以对其进行智能化使用和分享。KUKA机器人控制软件运行于WindowsXP+VxWorks平台,既可以提供良好的人机交互界面,又能提供精确的实时控制。
Keba与ABB和库卡不同,她不是机器人生产商,他的产品是工业级伺服控制系统,能够实现多自由度机器人的控制,该控制系统中通过VxWorks平台或者Windows+RTX实时扩展平台保证软件运行环境的实时性,通过运动规划和运动控制单元可以实现对总线式伺服驱动器的控制,从而达到对机器人的精确控制。通过上述分析,可以得到如下表所示的各国机器人标杆厂商其机器人控制系统在实时性,运动控制功能以及可扩展性等方面的比较。
VxWorks中运行了两套软件,分别是RobotControl和SoftPLC,它们组合在一起构成了控制系统软件的核心。其中RobotControl是负责机器人的运动控制,包括机器人的轨迹规划和插补操作,而SoftPLC则负责外围信号采样、逻辑控制等功能。
机器人控制器
从机器人产业发展来看,对机器人软件开发环境有两方面的需求。一方面是来自机器人最终用户,他们不仅使用机器人,而且希望能够通过编程的方式赋予机器人更多的功能,这种编程往往是采用可视化编程语言实现的,如乐高MindStormsNXT的图形化编程环境和微软RoboticsStudio提供的可视化编程环境。
随着机器人控制技术的发展,针对结构封闭的机器人控制器的缺陷,开发“具有开放式结构的模块化、标准化机器人控制器”是当前机器人控制器的一个发展方向。
免责声明:本网站(http://www.ciotimes.com/)内容主要来自原创、合作媒体供稿和第三方投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
本网站刊载的所有内容(包括但不仅限文字、图片、LOGO、音频、视频、软件、程序等)版权归原作者所有。任何单位或个人认为本网站中的内容可能涉嫌侵犯其知识产权或存在不实内容时,请及时通知本站,予以删除。




