从自动驾驶看“机器人看到世界”的进化之路
从自动驾驶看“机器人看到世界”的进化之路
2016-09-29 17:18:09 来源:网易科技 抢沙发
抢沙发
2016-09-29 17:18:09 来源:网易科技
摘要:科幻电影中,经常有各种高智能机器人的形象,或萌或暖或身手矫健或残忍邪恶,但是真的做成这样的机器人,还有很多问题,比如机器人该如何分辨感知眼前的一切,能否像人类一样通过眼睛分辨不同的物体?
关键词:
自动驾驶
机器人
科幻电影中,经常有各种高智能机器人的形象,或萌或暖或身手矫健或残忍邪恶,但是真的做成这样的机器人,还有很多问题,比如机器人该如何分辨感知眼前的一切,能否像人类一样通过眼睛分辨不同的物体?
用眼睛看世界,听起来很简单,实际上是亿万年进化的结果。人类视觉的形成需要有完整的视觉分析器,视网膜接受光的刺激,将光信号转变成生物电信号,通过视神经传递到大脑,结合人的经验和意识等构成视觉,进一步在大脑中形成形状、颜色等概念。
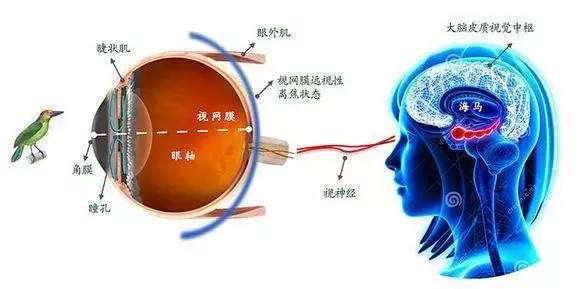
图1视觉的形成
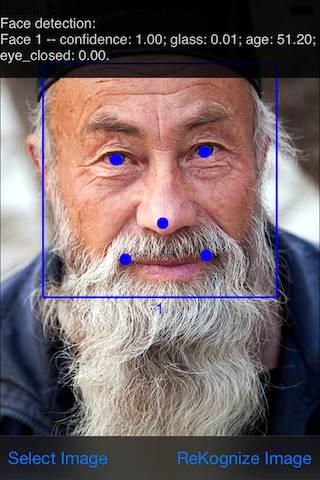
如何让机器人看到这世界,这就得靠科学家帮助它们“进化”了。在图像识别技术诞生之前,摄像头拍摄到的画面对于计算机而言就是一堆数字,无法和具体事物形成关联,相当于只有眼睛没有大脑。图像识别技术让计算机能够提取图像的特征,将元素剥离出来。每个图像都有它的特征,如字母A有个尖,P有个圈、而Y的中心有个锐角等。图像识别系统通过分析这些特征,从而判断图像的含义。相机的人脸识别就是在分析我们的面部特征。
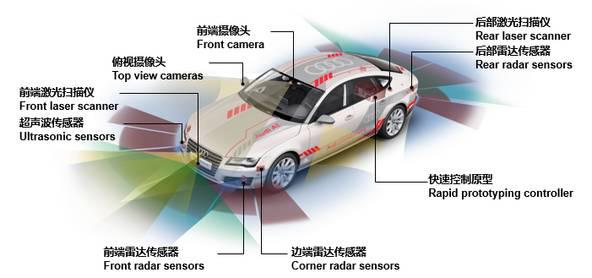
此外,时下最热门的自动驾驶也运用了图像识别技术:摄像头捕捉道路的画面,图像识别剥离出车辆、行人和指示牌等。但不同于照相机,自动驾驶时任何细小的差错都能酿成大祸,因此自动驾驶的汽车必须做到“眼观六路、耳听八方”,光有图像识别是远远不够的。
图像识别系统让汽车看到障碍物,包括行人、其他车辆、路牌等,并结合数据库和算法对障碍物进行分类分析。工程师提前“教育”行车电脑,红色圆圈的是路标,两条腿走路的是行人,方块的是货车……凡此种种,汽车对周遭的环境就有了基本的判断。

前文已经提到,图像识别也有失误的时候,但汽车可不能乱撞,这时就需要激光扫描仪。简单来说,激光扫描仪不断向外界发射光束,碰到障碍物时光束就会被反射,接收到反射信号就知道前方有障碍物。车身前后各布置了一个激光扫描仪,以此识别中远距离(80-150米)的障碍物,结合图像识别系统,蜥蜴可就无处藏身了。

但激光扫描仪也有“失明”的时候,当障碍物较近时,光束反射的时间极短,这就没法判断距离了。此时,汽车四周的超声波雷达就起到了重要作用,雷达是“第三只眼”。超声波雷达的原理与激光扫描仪类似,探头发射超声波,接收器接收反射信号,通过测量反射时间就知道障碍物的距离。一般而言,超声波的测距范围在5米以内,与激光扫描仪形成互补。
为方便大家理解,我们不妨把汽车观察世界比作一场考试,图像识别系统的工作就是写完整张试卷,激光扫描仪负责第一次检查,雷达则是“doublecheck”。实际运用时,它们之间的配合要复杂得多。
 图像识别+激光扫描仪+雷达=“火眼金睛”
图像识别+激光扫描仪+雷达=“火眼金睛”
你以为这就结束了么?No!No!No!
婴儿刚出生时对什么都很好奇,滚烫的开水都敢摸,因为他们不能将“开水”和“疼痛”联系起来,他们缺乏生活经验,它看到了每一个障碍物,但它仍缺乏“思考能力”。
它还需要一个大脑——快速控制原型(Rapidprototypingcontroller):
“火眼金睛”+快速控制原型=自动驾驶
快速控制原型调用了庞大的数据库和人工智能算法,这就是工程师赋予A7概念车的“人生经验”和“思考能力”。遇到行人要躲避、前方堵车要停车、有限速标志要减速,这些普通驾驶员都掌握的技能其实是工程师长期研发的结果,自动驾驶可是一个涉及多领域的交叉学科哦。
(文章来源:网易科技)
第三十八届CIO班招生
国际CIO认证培训
首席数据官(CDO)认证培训
责编:houlimin
免责声明:本网站(http://www.ciotimes.com/)内容主要来自原创、合作媒体供稿和第三方投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
本网站刊载的所有内容(包括但不仅限文字、图片、LOGO、音频、视频、软件、程序等)版权归原作者所有。任何单位或个人认为本网站中的内容可能涉嫌侵犯其知识产权或存在不实内容时,请及时通知本站,予以删除。




